A Proportional Controller adjusts the output such that it is proportional to the current error. The error is the difference between the current value of the process variable and the target. Hence, unlike the Dead Band Controller (whose output is either zero or a specified value), the output of a Proportional Controller can vary continuously between some maximum value and zero.
How the error is calculated is a function of whether the Controller is an Inflow or Outflow Controller:
- Outflow Controllers: Error = Process Variable – Target
- Inflow Controllers: Error = Target – Process Variable
The output is then computed as follows:
Output = Min (Max (Bias + Proportional Gain*Error, 0) , Flow Capacity)
where Bias and Proportional Gain are user-defined inputs.
GoldSim starts by computing the output as Bias + Proportional Gain*Error. That is, the output is linearly proportional to the error. Note, however, that there are two constraints imposed:
- The output cannot be less than zero. This could happen if the Error was sufficiently negative.
- The output cannot be greater than the Flow Capacity.
Hence, when you select “Proportional” as the Method, there are three additional inputs that must be provided:
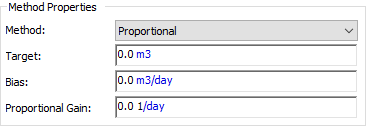
Target: This is the desired value of the process variable. Hence, it must have the same dimensions An output attribute for an element that defines the dimensionality (in terms of Length, Time and other fundamental dimensions) of the output. as the process variable (Flow Units * Time). While the Target is often constant, it can be specified to change with time.
Bias: This is the value of the output when the error is zero. As a result, if this is an Outflow Controller, the Bias can be thought of as the sum of the expected uncontrolled inflows minus expected uncontrolled outflows. If this is an Inflow Controller, the Bias can be thought of the sum of the expected uncontrolled outflows minus expected uncontrolled inflows. That is, if the error was currently at zero, the Bias is the flow needed to maintain a zero error given other expected uncontrolled inflows and outflows. Note that the Bias is typically specified as a constant, but can be specified as a function of time. In fact, doing so is required for some processes in order for this type of Controller to perform well.
Proportional Gain: This has dimensions of inverse time, and represents how strongly the Controller responds to the error. The larger this number, the quicker it responds. The Proportional Gain is intended to be a constant.
Learn more
- Basic Controller Inputs
- Browser View of a Controller
- Comparing the Different Methods: Which Type of Controller Should I Use?
- Constraints on the Output of Controllers
- Controlling a Process Using Multiple Controllers
- Defining a Deadband Controller
- Defining a Proportional Controller
- Defining a Proportional Integral Derivative (PID) Controller
- Defining a Target that Represents an Upper or Lower Limit
- Turning a Controller On and Off
- Understanding Controllers
- Using a Proxy for the Process Variable When Defining a Controller
- Using Controller Elements