There are a number of ways that a computer could fail. Hence, lumping these various failure modes into a single exponential rate is surely a simplistic approach. Furthermore, our simple model does not represent repairs. If our objective is to predict the availability of the computer, we need to simulate repairs too.
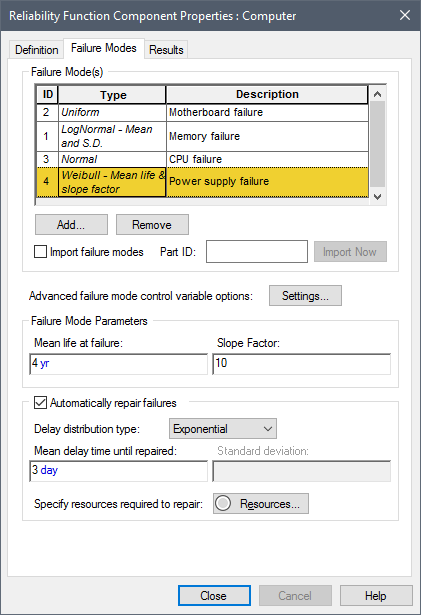
To facilitate this, GoldSim allows us to move beyond a simple exponential failure rate, and specify multiple distinct and independent failure modes. In the dialog below, we have specified five separate failure modes for the computer:
Each failure mode represents a particular type of failure (e.g., failure of the power supply), and each type of failure has its own distribution, which does not have to be exponential. For example, the Power Supply failure mode uses a Weibull distribution (a common failure distribution for reliability models).
Each failure mode can also be specified to be automatically repaired (with the time until it is repaired being different depending on the failure mode). In the example above, if the computer fails due to the Power Supply failure mode, it is assumed to be repaired in approximately 3 days (repair time is modeled using a distribution, and is therefore variable).
It is important to note that the failure mode control variable (i.e., the variable that is referenced by the failure mode to determine when failure occurs) for failure modes does not have to be absolute or operational time. In the case of a car you might build a model that uses the car’s mileage to determine when failure occurs, while in the case of an airplane, you might base failure modes on the number of takeoffs and landings. In these cases, other elements in your GoldSim model would be used to model the cumulative mileage or cumulative number of takeoffs and landings. In fact, this is one of the most powerful features of the Reliability Module; because it is part of a general-purpose simulation framework it can incorporate many factors into the analysis that other approaches cannot.
Similarly, failure mode parameters do not have to be constant during the course of the simulation. You might change the failure mode parameters to reflect the current state of the system, (e.g., you could specify that a failure of a car’s rear braking system increases the wear on its front braking system), or to reflect the effects of the operating environment (e.g., a computer’s failure rates could be influenced by the temperature and humidity of the room).
 Note: By default, failures
are assumed to be fatal to the component. That is, if a particular failure
mode occurs, the component itself fails and is no longer operative. However, if
desired, you can specify that a failure mode is non-fatal in order to model more
complex failure mode behavior.
Note: By default, failures
are assumed to be fatal to the component. That is, if a particular failure
mode occurs, the component itself fails and is no longer operative. However, if
desired, you can specify that a failure mode is non-fatal in order to model more
complex failure mode behavior.
Learn more about: